AVL vs Red-Black Tree: What the Height Difference Actually Costs
- AVL balance factor stays in {-1, 0, +1} at every node; red-black enforces equal black-height on every root-to-leaf path, not absolute height.
- AVL height ≤ 1.44 log₂ n (from Fibonacci recurrence); red-black ≤ 2 log₂(n+1). Both approach log₂ n on random data.
- Both trees limit insert to two rotations. AVL delete needs up to O(log n) rotations; red-black caps at three with O(1) amortized (Tarjan 1985).
- AVL is 2.18x faster for sorted insertions per a 2025 benchmark. Red-black wins by ~1.28x on random deletes.
- Standard libraries universally pick red-black (Java TreeMap, C++ std::map, Linux kernel). AVL wins for augmented trees and sorted-insert workloads.
Every major standard library picked one of them. Java's TreeMap, C++'s std::map, the Linux kernel's virtual memory subsystem, nginx's timer wheel. They all chose the red-black tree. If AVL trees are more balanced, why did the industry collectively ghost them?
The short answer: tighter balance costs more than it gives back. That's mostly true. But a 2025 benchmark study found that AVL trees are actually faster than red-black trees for sorted insertions, by more than 2x. The difference depends heavily on your workload.
Let's derive it from scratch.
Both Trees Solve the Same Problem
A plain binary search tree degrades to a linked list on sorted input. Insert 1, 2, 3, 4, 5 and you get a right-leaning chain with O(n) search. Insert them in random order and you get something closer to balanced, but you're at the mercy of the input. Both AVL and red-black trees solve this by enforcing a structural invariant that keeps height at O(log n), no matter what order the data arrives.
They agree on what they're preventing. They disagree on how tightly to prevent it.
Think of it like speed limits. AVL says 25 mph at all times. Red-black says you can go 50 if half the car is painted red. Both keep you out of the ditch. One is stricter.
The Two Invariants
An AVL tree tracks a balance factor at every node: height(left) - height(right). That value must stay in {-1, 0, +1} always. Any insertion or deletion that pushes a node's balance factor to ±2 triggers rotations at that node.
def balance_factor(node): lh = node.left.height if node.left else -1 rh = node.right.height if node.right else -1 return lh - rh # AVL invariant: abs(balance_factor(node)) <= 1 for every node
A red-black tree enforces five rules instead. Every node is red or black. The root is black. Red nodes cannot have red children. Every path from any node to a null leaf passes through the same number of black nodes. Null leaves count as black.
def black_height(node): if node is None: return 1 # null is black lbh = black_height(node.left) rbh = black_height(node.right) if lbh < 0 or lbh != rbh: return -1 # violation return lbh + (0 if node.is_red else 1) # RB invariant: black_height(root) >= 0
The AVL constraint is about actual height. The RB constraint is about black height, which allows red nodes to extend paths without penalty.
That distinction drives every tradeoff that follows.
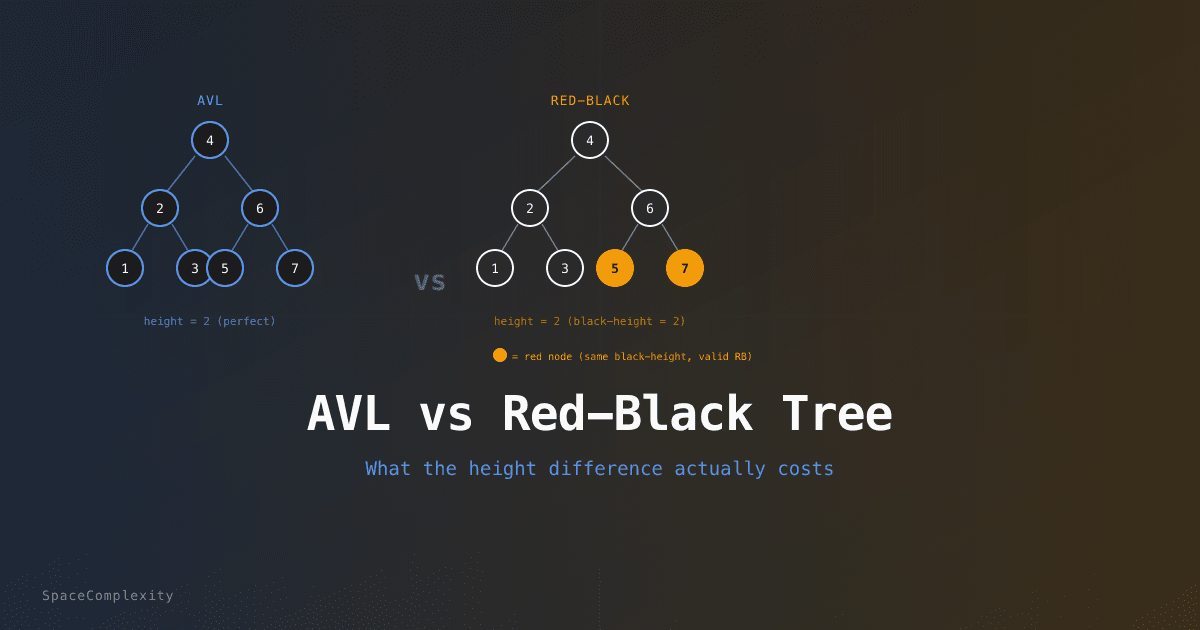
 Same seven keys, same black-height. The red-black tree is valid even though it looks slightly lopsided. AVL would not allow that.
Same seven keys, same black-height. The red-black tree is valid even though it looks slightly lopsided. AVL would not allow that.
Height: How Far Does Loose Balance Go?
AVL trees are bounded at height ≤ 1.44 log₂ n. Red-black trees at ≤ 2 log₂(n+1). In practice, both sit closer to log₂ n for random data.
Deriving the AVL bound: the worst-case AVL tree for a given height packs in the minimum possible nodes while staying valid. Let N(h) be the minimum nodes at height h. To build a tree of height h that's barely legal, make one subtree of height h-1 and one of height h-2:
N(h) = N(h-1) + N(h-2) + 1
N(0) = 1, N(1) = 2
This is exactly the Fibonacci recurrence. Since Fibonacci grows as φ^h where φ ≈ 1.618, we get N(h) ≈ 1.44 log₂ n. The 1.44 factor is the logarithm in base φ rewritten as a base-2 logarithm. Fibonacci shows up where you least expect it.
Deriving the RB bound: every path from root to null has the same black height bh. A node with black height bh has at least 2^bh - 1 descendants (prove by induction: a leaf has black height 1 and 1 node = 2^1 - 1). Since no two consecutive nodes on a path can be red, at most half the nodes on any root-to-null path are red. So actual height h ≤ 2 × bh, which gives h ≤ 2 log₂(n+1).
For a million nodes, that's AVL ≤ 29 versus RB ≤ 40. Eleven extra levels in the worst case. In practice, a random RB tree is typically only 10-15% taller than the equivalent AVL tree. The 38% gap is a worst-case figure. Balanced-random inputs don't come close to it.
 At n = 10⁶: theoretical min = 20, AVL ≤ 29, RB ≤ 40. The gap is real but smaller than it looks on paper, because random data doesn't hit worst-case shape.
At n = 10⁶: theoretical min = 20, AVL ≤ 29, RB ≤ 40. The gap is real but smaller than it looks on paper, because random data doesn't hit worst-case shape.
Rotations: The Update Cost
This is where the tradeoff actually lives. Not the heights. The rotations.
Insert
For both trees, an insertion starts at a leaf and works its way up, rebalancing as needed. The key question is: once you fix a violation at some node, does a violation still exist above it?
For AVL, a rotation at the lowest unbalanced node restores that subtree's height to exactly what it was before the insertion. The parent sees no change in height, so no further rotations are needed. At most two rotations per insert, period. (A single rotation for the LL or RR case, a double rotation for the LR or RL case.)
For RB, the same logic applies for the final step. Insert cases: if the uncle is red, just recolor (no rotation). If the uncle is black, one or two rotations fix it and the subtree's black height is restored. So: at most two rotations per insert for RB trees too. The difference is that recoloring can propagate all the way to the root, though this doesn't cost extra time.
Both trees: O(log n) to find the position, at most 2 rotations to fix it.
 The same three-node imbalance handled two ways. Both land in a balanced state after one rotation. AVL needs one balance-factor update per node; RB needs a color flip. Neither is obviously faster here.
The same three-node imbalance handled two ways. Both land in a balanced state after one rotation. AVL needs one balance-factor update per node; RB needs a color flip. Neither is obviously faster here.
Delete
Here the trees diverge. And this is why red-black won.
For AVL, deletion is nastier. When a rotation fixes a node after deletion, that subtree's height might decrease by one. That makes the parent unbalanced. That rotation might make the grandparent's subtree shrink. The imbalance can cascade all the way to the root. AVL deletion requires up to O(log n) rotations. You fixed it at the bottom and broke it at the top.
For RB, the rebalancing after deletion caps at three rotations. The clever insight is that RB uses a "double-black" mechanism when a black node is removed. Rebalancing can propagate upward, but it does so via recoloring rather than rotations. Rotations only happen at the end of the propagation chain, and that chain resolves within a constant number of them.
Tarjan proved in 1985 (see CLRS problem 17-4) that any sequence of m insert and delete operations on an initially empty RB tree causes O(m) total structural modifications. That is, O(1) amortized rotations per operation. AVL inserts are also O(1) amortized, but AVL deletes are not: alternating insertions and deletions can force Θ(log n) rotations per delete.
| Operation | AVL worst case | AVL amortized | RB worst case | RB amortized |
|---|---|---|---|---|
| Insert | 2 rotations | O(1) | 2 rotations | O(1) |
| Delete | O(log n) rotations | O(log n) | 3 rotations | O(1) |
This table is why every major standard library made the same call. When you're building a general-purpose sorted container, you want predictable delete behavior. RB gives you that. AVL makes you pay a potentially large but bounded tax every time you remove a node.
The Performance Paradox
More rotations on delete suggests AVL should be slower for write-heavy workloads. Mostly that holds. But a 2025 study by Brown ("Comparative Performance of the AVL Tree and Three Variants of the Red-Black Tree") found results that complicate the story.
For random-order operations, the standard RB tree (bottom-up) is about 1.28x faster than AVL for deletion. Not dramatically faster.
For sorted-order insertions, AVL is 2.18x faster than the bottom-up RB tree. The reason is cache behavior. Sorted input creates monotone access patterns with far fewer cache misses (7 to 117 times fewer by measurement). AVL's stricter balance generates fewer rotations on nearly-sorted data, and on top of that, the cache advantages compound.
The "AVL is for reads, RB is for writes" rule of thumb is directionally right but quantitatively misleading. The difference is small for random workloads and can reverse entirely for structured access patterns.
The sorted-insert case matters more than you'd think. Database indexes built from pre-sorted bulk loads, log-structured data ingestion, time-series insertions. All of these arrive roughly in order. For those workloads, AVL is measurably faster and the conventional wisdom doesn't apply.
The Storage Difference
AVL nodes store a height field. In practice, that's a 4-byte integer or a compact 2-byte field. An AVL tree of height h requires at least φ^h/√5 nodes, so a height above 65,535 would need more nodes than atoms in the observable universe. Either way, a node is about 32-40 bytes with typical pointer sizes.
RB nodes store one bit (red or black). The Linux kernel packs this into the unused low bit of the parent pointer: rb_parent_color in linux/rbtree.h. Node overhead is identical to a plain BST node.
For a million nodes, the difference is maybe 4MB. Practically irrelevant unless you're building an in-memory database. If the 4MB is what stands between you and picking the right structure, you have bigger problems.
When to Use AVL vs Red-Black Tree
Reach for red-black when:
You're using a general-purpose ordered container in most applications. The standard library has already made this choice: Java TreeMap/TreeSet, C++ std::map/set/multimap/multiset, the Linux kernel's VMA tracking and timer management, nginx's connection and event handling. You inherit their decision.
RB also wins when your workload is a mix of random inserts and deletes. The constant-time amortized bound on all operations is attractive for real-time systems that cannot tolerate a periodic O(log n) delete spike.
Reach for AVL when:
Your data arrives in roughly sorted or monotone order and you're inserting a lot of it. This is common in database indexes built from pre-sorted bulk loads. The 2x advantage for sorted insertions is real.
AVL also shines when you need to augment the tree. An order-statistics tree (which stores subtree sizes to answer rank queries in O(log n)) is easier to reason about under the strict AVL invariant. Each rotation updates exactly two size fields. Red-black trees support the same augmentation, but the case analysis for deletion rebalancing is more complex, and the number of rotations per operation can differ from AVL's. For augmented trees where the augmented field depends only on node and children, both work, but AVL's simpler delete logic makes bugs less likely.
The competitive programming community often reaches for AVL trees when building order-statistics trees or interval trees from scratch, even though red-black trees perform comparably. The simpler invariant makes it easier to get the augmentation right under time pressure. When you have 45 minutes and a whiteboard, simpler is worth a lot.
 If this flowchart led you to AVL twice, that's not a bug. AVL has more real use cases than most textbooks admit.
If this flowchart led you to AVL twice, that's not a bug. AVL has more real use cases than most textbooks admit.
The Rotation Cases, Concisely
For completeness: AVL has four rotation patterns. Call them by where the imbalance lives. If node z is right-heavy and its right child y is also right-heavy, a single left-rotation at z fixes it. Mirror that for left-heavy. If z is right-heavy but y is left-heavy, you need a double rotation: right-rotate y first, then left-rotate z. These are the RR, LL, RL, and LR cases.
RB insert has three cases. If the newly-inserted red node's uncle is also red, recolor parent, uncle, and grandparent (no rotation). If the uncle is black and the new node is on the "inner" side relative to the grandparent (a zigzag pattern), rotate to straighten it first. If it's already on the outer side, one rotation at the grandparent fixes it.
The RB case structure is more complex to implement, but the rotation count tops out at two, the same as AVL.
The moral: the complexity of the algorithm isn't in the rotations. It's in correctly identifying which case you're in. If you've ever debugged an RB tree insertion by hand, you know. It's fine. You just need more coffee.
Quick Recap
- AVL enforces balance factor ≤ 1 at every node. RB enforces equal black-height on every path. AVL is stricter.
- AVL height ≤ 1.44 log₂ n (derived from Fibonacci recurrence). RB height ≤ 2 log₂(n+1).
- Both: at most 2 rotations per insert.
- AVL delete: up to O(log n) rotations. RB delete: at most 3 rotations, O(1) amortized.
- RB trees are ~1.28x faster for random deletes. AVL trees are ~2.18x faster for sorted inserts.
- Standard libraries universally use red-black. Augmented trees and sorted-insertion workloads are where AVL holds its own.
- The 1-bit color vs 4-byte height storage difference is negligible in practice.
For end-to-end implementations in all fourteen languages from Python to PHP, see the full reference guide.
Preparing for interviews where these come up in system design or algorithmic questions? SpaceComplexity runs you through voice-based mock interviews with rubric-based feedback, so you practice explaining tradeoffs out loud the way an actual interview demands.
Further Reading
- Red-black tree, Wikipedia
- AVL tree, Wikipedia
- Introduction to Algorithms, Chapter 13 (Red-Black Trees) and 14 (Augmenting Data Structures), Cormen et al.
- Comparative Performance of the AVL Tree and Three Variants of the Red-Black Tree, Brown (2025)
- Red-Black Trees in the Linux Kernel, kernel.org documentation
- AVL Tree Data Structure, GeeksforGeeks